
Купил на попробовать пару плат ввода-вывода — одну сетевую, другую юсб-ишную. Есть мысль собрать и написать полностью самодельный автопилот. Мозги- на одноплатном компе, управление силовой частью- с помощью подобных плат, исполнительный механизм- гидравлическая малогабаритная маслостанция, программа- на си. Вопросов два- логика работы и энергопотребление. Если вдруг кто-то что-то слышал про аналогичные проекты или тем более сталкивался — большая просьба поделиться ссылочкой в каменты.
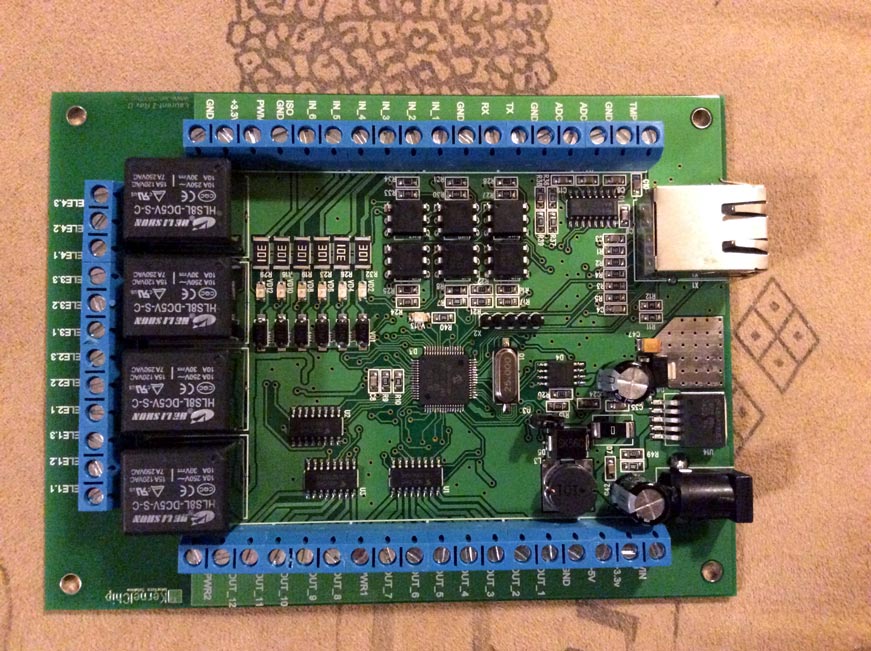
2. плата ввода вывода MP712 Laurent-2 — этакая мечта максималиста-перестраховщика — 4 рэле, куча дискретных ввод-ввыводов, 2 ацп и управление по локальной сети. Наша отечественная. Собрана аккуратненько. Но на фоне следующей выглядит простенько.
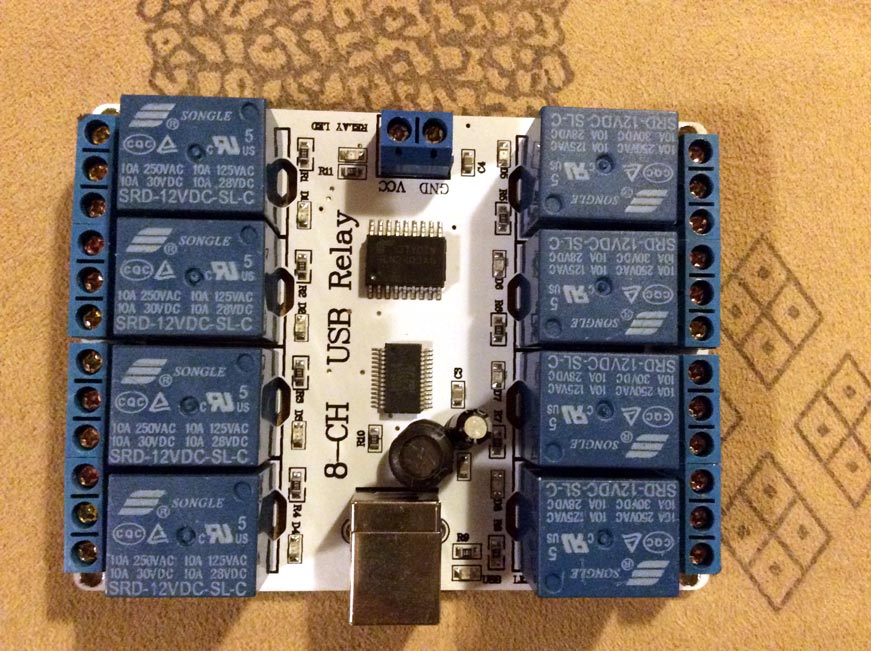
3. Плата вывода — управление 8-мью рэле. Подколючение по USB. Модель SAINSMART 8-channel 12 V USB Relay Board Module Controller:
4. Пара стабилизаторов на 10 ампер каждый:
Покупал все тут: electronshik.ru













13 комментариев
Вооот. Была у меня идея сделать авторуль, но на PIC контроллере и от самодельного датчика ветра. Потом пришел к тому, что все таки механика лучше, искричество не жрет. Но так как у тебя твой «квадратиш» тяжеленький,механикой тут не отделаешься. Кстати, я не в курсах насколько сбаллансированно у тебя перо руля, но все таки подкину мыслю, пусть она тебя помучает перед сном. Может в целях экономии искричества твоему автопилоту будет легче рулить не рулем, а кормовой (ну или носовой) подрулькой ?
Перо у меня полубалансирное. Рулить надо всетаки пером, потомучто сколько нибудь да лодка будет лежать на руле, при этом энергия не потребляется. А вот постояннон подруливание подрулькой будет жрать мега много. Там токи как у стартера в машине- сотня ампер. Этож фактически одноразовое устройство- высасывает батарею весьма быстро.. ну по крайней мере там где я сталкивался- на баварии44 подрулька быстро сажала акб…
Ну ведь сам понимаешь, что должен быть «пороговый» эффект. Чтоб не постоянная работа подрульки была, а только если отклонение судна превысит какой то порог. Ну а тут конечно зависит все от того, какой ты движок на маслопомпу авторулевого поставишь. Просто если принять во внимание то,что при каждом преобразовании КПД теряется, то подрулькой можно подэкономить малеха. Хотя, что я тут разошелся ??? Я идейку ляпнул — решай сам.
Подрулька имеет низкий КПД из-за преобразования электроэнергии в механическое движение, с большим трением винта об воду.
Если ветрогенератор покрывает по мощности расходы на электроавтопилот, то с ветровым и заморачиваться не стоит.
Неправильная аргументация. Вместо руля нельзя использовать подрульку не потомучто кпд или чтото еще, а потомучто лодка в той или иной степени почти всегда будет лежать на руле. Тоесть постоянно идти с отклоненным на сколько то градусов рулем. При этом не тратя нисколько энергии. Если пытаться это обеспечить подрулькой то она должна жужжать постоянно.
И да я расчитываю на электропилот, потомучто городить огород с ветровым ну очень нехочется- для таких размеров лодки он будет ну очень внушительным.
Как у тебя обстоят дела с автопилотом на данный момент ?
И скинь на мою почту свой адрес, я те книженцию перекину про автопилоты.
С автопилотом- ну я так лениво рою буржунет, но ничего пока нет. нескоро еще. Моя почта steelratboat@gmail.com
Авторулевой вы будете состыковавать с картплотером типа «ns3000» или он должен работать автономно, выдерживая курс и положение относительно ветра?
Делал что-то похожее, но использовал не гидро а электропривод.
Нет пока в голове видения как правильно все это построить
В планах создать целый комплекс, автоматический прокладчик курса, сбор статистики ходовых качеств и затем уже в зависимости от карт прогноза GRIB и собранной статистики прокладывать оптимальный маршрут. Авторулевой будет тупой железякой (взаимодействующей с компасом (гирокомпасом) и по NMEA с компьютером). Не знаю как устроены промышленные авторулевые, но у меня была проблема с компасом. В качестве угломера на 3-х осевой компас я использовал акселерометр, который на волне давал не правильные значения, из-за этого данные с него приходилось интегрировать и получалась задержка, т.ч. лучше использовать компас с гироскопом и пузырьковым датчиком угла.
А научите общаться с НМЕА с компа? Это ведь ethrnet но с другими уровнями сигналов? Нужен какойто преобразователь?
Там RS232 — физический интерфейс (COM порт). Но скорее всего не +-12 а 5 В. C NMEA я пока сам не умею общаться, буду искать готовую библиотеку. Но вроде там не сложно — текстовая информация передается.
Вот такое находил — https://pypilot.org/. Работает на малинке, заявлена интеграция с OpenPlotter.